


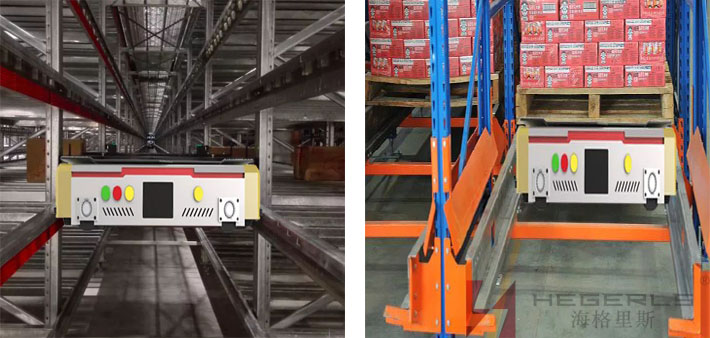
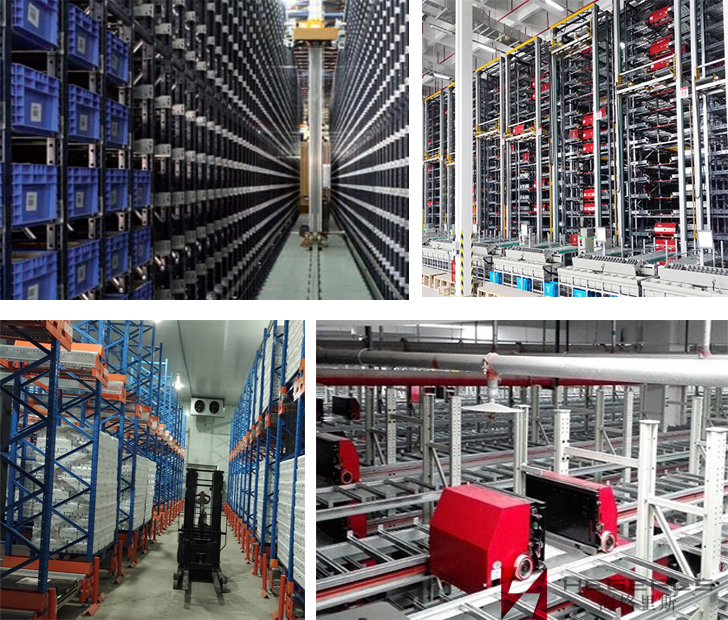
In den letzten Jahren hat sich der E-Commerce mit der anhaltenden Popularität des Internets rasant weiterentwickelt. Die von den Kunden bestellten Waren weisen die Merkmale vieler Sorten, weniger Chargen und kurzer Lieferzeiten auf, wodurch sich die Lagerdichte der Regale im Logistikverteilzentrum des Lieferanten kontinuierlich verbessert. Die Häufigkeit, mit der Materialien das Lager betreten und verlassen, nimmt zu. Die Zahl der Kleinteilekommissionierungen nimmt von Tag zu Tag zu. Immer mehr Logistik-Verteilzentren nutzen das Shuttle-Car-basierte Waren-zu-Personen-Kommissionierungssystem.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Klemm-Teleskopgabeln werden häufig in automatischen Lagergeräten wie Stereo-Lager-Mehrschicht-Shuttle-Wagen, Regalbehältern, AGVs, RGVs und Kleintransportern eingesetzt. Das maximale Gewicht der von HEGERLS gehaltenen Materialkiste kann 50 kg erreichen. Die Klemmbreite des Gabelarms kann im Bereich von 200 bis 600 mm beliebig eingestellt werden. Der maximale Kommissionierweg beträgt 840 mm. Die maximale Betriebsgeschwindigkeit der Teleskopgabel beträgt 1,5 m/s und die Beschleunigung beträgt 1,2 m/s². Das Betriebsgeräusch wird auf 75 dB begrenzt, was den Anforderungen der meisten Einzel- und Doppelauszugsgestelle gerecht wird. HEGERLS kann das mehrschichtige stereoskopische Shuttle-Car-Lager des Greif-Teleskopgabelkastens auch an die spezifischen Anforderungen der Kunden anpassen, wie z. B. die Greifbreite, den Kommissionierhub und andere Parameter.
Die Teile im Hiygris HEGERLS-Teleskopgabelkasten-Mehrschicht-Shuttle-Auto-Stereolager Die Teleskopgabel ist ein Teleskopmechanismus, der im Stereolager und im logistischen automatischen Lagersystem zur Materiallagerung oder -übertragung verwendet wird. Es verfügt über eine flexible Zwei-Wege-Automatik-Erweiterungsfunktion und eine genaue Grenzfunktion! Es kann direkt am Stapler, an einem festen Hebemechanismus oder an einer mobilen Hebeplattform montiert werden. Der Stapler fährt durch die Fahrbahn zwischen den Regalen, um automatisch auf Artikel zuzugreifen oder diese zu transportieren! Es kann mit einem Produktionsliniensystem und einem Unternehmensmanagementsystem verbunden werden. Es nutzt Computer- und Barcode-Technologie (Encoder), um eine intelligente Verwaltung und Bedienung von Informationen zu realisieren!

Über HEGERLS Klemm-Teleskopgabel
Die HEGERLS-Teleskopgreifergabel ist eine einzigartige Art von Gabel in der Reihe der Teleskopgabeln von Staplern, nämlich eine automatische Zwei-Wege-Teleskopgreifergabel, auch bekannt als Haltegreifergabel oder Haltegreifergabel, Gabelgabel oder Gabelgabel . Es handelt sich um eine Gabel, die speziell für den Transport kleiner Behälter verwendet wird. Durch die Erweiterung des Gabelarms und die Kupplung des Hebels (Haken) kann es direkt auf einem mehrstöckigen Kommissionier-AGV oder anderen Arbeitsplattformen montiert werden. Vollständiger Zugriff oder Transfer!
Die HEGERLS-Greifergabel besteht größtenteils aus einer Aluminiumlegierung und zeichnet sich durch geringe Größe, geringes Gewicht, hohe Laufgeschwindigkeit und gleichmäßige Ausdehnung aus. Gleichzeitig wird auch das Prinzip der Mehrmotorensynchronisation übernommen, sodass derselbe Teleskopgabelmechanismus zum Transport oder Zugriff auf Kartons unterschiedlicher Spezifikationen verwendet werden kann. Es verbessert nicht nur effektiv die Lagereffizienz, sondern verbessert auch die Raumnutzungsrate der Lagerung erheblich, insbesondere bei hochhausintensiver intelligenter Lagerhaltung!
HEGERLS-Teleskopgabelstruktur zum Aufstecken
Der Aufbau der HEGERLS-Greifergabel kann in tiefe Lagerplätze und flache Lagerplätze unterteilt werden. Ein tiefer Lagerort ist ein Lagerort mit zwei Materialboxen und ein flacher Lagerort ist ein Lagerort mit einer Materialbox. Das heißt, ein tiefer Lagerort kann zwei Materialkisten gleichzeitig klemmen, während ein flacher Lagerort jeweils nur einen Materialkisten klemmen kann. Der Unterschied zwischen der HEGERLS-Greifgabel und der gewöhnlichen Duplex-Teleskopgabel besteht darin, dass die Fingerzuggabel immer noch aus drei Gabelkörpern besteht, nämlich dem inneren Gabelkörper, dem mittleren Gabelkörper und dem äußeren Gabelkörper, mit Ausnahme des vorderen Gabelkörpers verfügt über eine weitere Zugstange (Haken), die mit der Führungsschiene (Gleitschiene), der Rollenstange, dem Synchronrad, dem Synchronriemen, der fließenden Stange, der Schaltstange (Haken), der Hebewelle, der Radstange und dem Antriebsmotor (Servo) zusammenpasst. , Schaltstangenmotor Das Erkennungsinstrument und andere Komponenten bilden einen vollständigen Teleskopmechanismus, der mit dem Teleskopgabelarm und der Kupplung des Hebels (Haken) zusammenarbeitet, um den Zugriffs- oder Übertragungsvorgang abzuschließen!
Funktionsprinzip der HEGERLS Clip-on-Teleskopgabel
Der Gabelarm der HEGERLS-Greifgabel ist seitlich stehend und seitlich durch eine Führungsschiene verbunden. Durch Steuerung kann die Führungsschiene vor und zurück verschoben werden, um den Abstand zwischen den beiden Gabelarmen der Gabel anzupassen und so die gemeinsame Verwendung einer Gabel für Materialboxen mit mehreren Spezifikationen zu erreichen! Beim Aufnehmen von Materialien fährt die Gabel in die Materiallagerposition aus, der Haltehaken (Hebel) senkt sich automatisch ab und blockiert die Stirnseite des Kartons oder der Kunststoffbox. Anschließend fährt die Gabel zurück und zieht den Karton oder die Kunststoffbox in die Mitte die Gabel und bewegt sich dann je nach Gradanforderung rückwärts heraus, der Haken (Hebel) wird zurückgezogen und die Gabel fährt wieder zurück, um die Aufgabe des Aufnehmens oder Übertragens abzuschließen! Obwohl das Prinzip der Greifergabel dem einer gewöhnlichen Teleskopgabel entspricht, unterscheiden sich die Übertragungsteile, Pleuel und andere Komponenten der Fingergabel erheblich. Es wird verwendet, um zu beschreiben, dass das Kettenrad, die Kette, das Zahnrad, die Zahnstange usw. alle durch Synchronräder, Synchronriemen usw. ersetzt werden, während der Gleitarm Führungsschienen verwendet und die Materialien des Gabelkörpers alle durch Metallbleche ersetzt werden oder Aluminiumlegierungsmaterialien, sodass das Gewicht der Greifergabel nur etwa 80 kg beträgt.
Darüber hinaus ist zu beachten, dass bei der Konstruktion der Greifer-Teleskopgabel die Größe der dichten Lagerregale, die vertikale Position der Regale mit Kisten, die Gleisebene und die Größe der Kisten kombiniert werden sollten, um das zu bestimmen Gesamtparameter der Verlängerungsgabeln (Bewegung der Verlängerungsgabel, Kastenabstand, Gabelbreite, Gabelinnenbreite, Gabelhöhe usw.), um den Anforderungen der Behälter in den Regalen gerecht zu werden. Die Klemmgabel kann nur die in Kartons oder Plastikboxen verpackten Produkte effektiv transportieren oder darauf zugreifen, unregelmäßige Materialien jedoch nicht. Darüber hinaus sollten Volumen und Gewicht der umgefüllten Materialkiste nicht zu groß sein und das Ladungsgewicht 100 kg nicht überschreiten! Die Höhe der Klemmgabel richtet sich grundsätzlich nach der Höhe des Behälters!
Über HEGERLS Clip on Shuttle
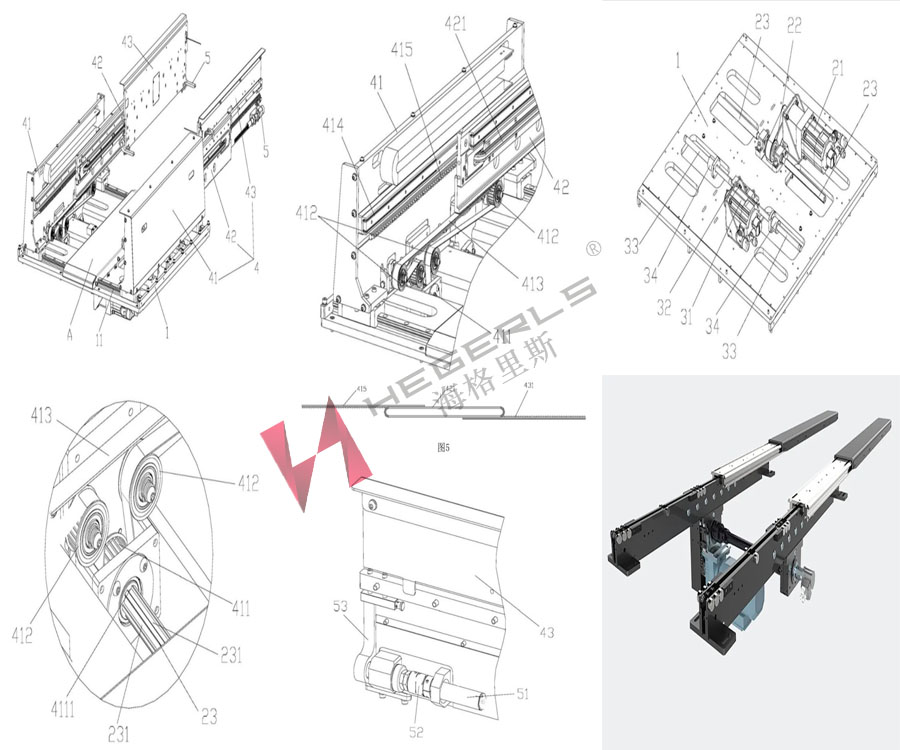
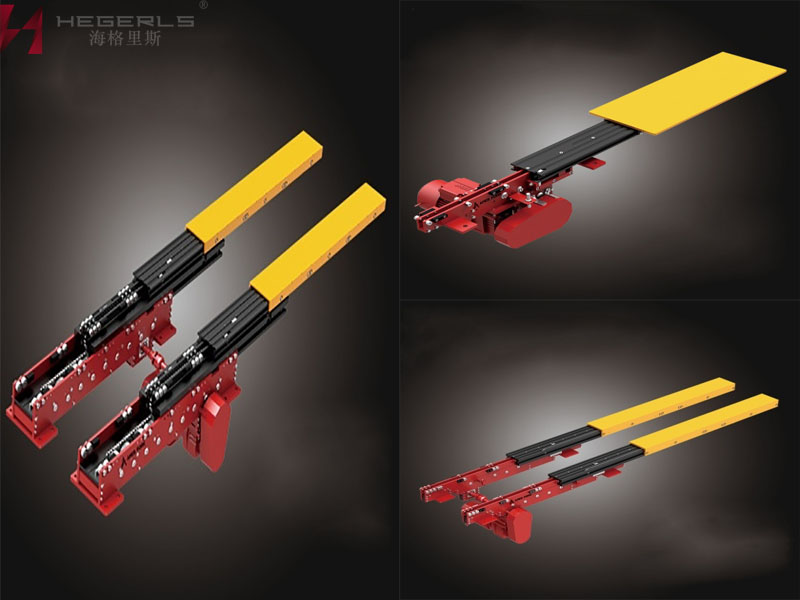
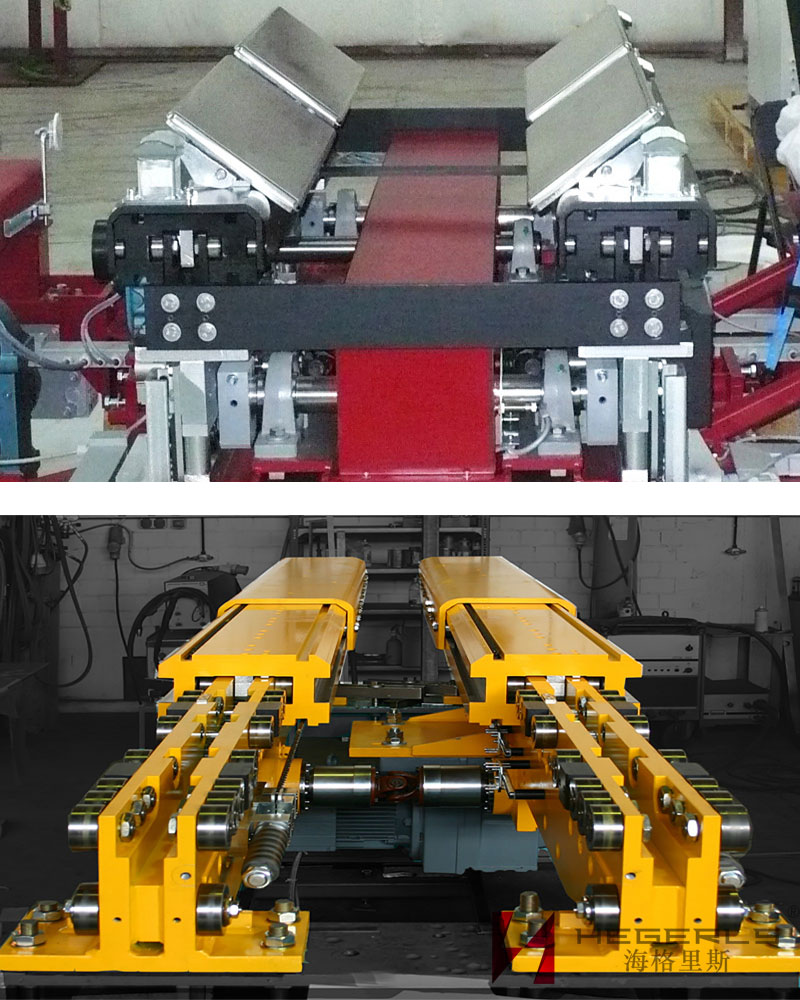
Die Struktur des HEGERLS Clip-On-Shuttles besteht aus Shuttle-Rahmen, Shuttle-Chassis, Fahrmechanismus, sekundärem Gabelverlängerungsmechanismus, Kollektor, Lagerplatte und Lagerplattform. Der Aufbau ist wie folgt:
Jeder Shuttle-Rahmen ist normalerweise ein geschlossener Hohlraum, der aus den Hauptkörperhalterungen auf beiden Seiten, der Schale und der inneren Nabenhalterung besteht und jeweils an beiden Enden des Shuttle-Chassis angeordnet ist. Die Schale ist mit einer oberen Abdeckung versehen, die durch ein Drehtürscharnier geöffnet und geschlossen werden kann; Oberhalb der Nabenhalterung ist ein Gitterrost angeordnet; Der Fahrmechanismus umfasst ein Antriebsrad, ein passives Rad, einen bürstenlosen Gleichstrommotor, ein Untersetzungsgetriebe und eine Verbindungswelle; Beide Seiten des Shuttle-Rahmens an einem Ende des Shuttle-Chassis sind mit Antriebsrädern versehen, die durch Verbindungswellen verbunden sind, und beide Seiten des Shuttle-Rahmens am anderen Ende des Shuttle-Chassis sind mit passiven Rädern versehen, die durch Verbindungswellen verbunden sind; Der bürstenlose Gleichstrommotor arbeitet mit dem Untersetzungsgetriebe zusammen, um das Antriebsrad und das passive Rad anzutreiben. Die Verbindungswelle ist mit einem magnetischen Encoder ausgestattet, über den die Start- und Stopppositionen des Shuttles auf der geraden Strecke ermittelt werden. Ein sekundärer Gabelausfahrmechanismus ist symmetrisch an der Innenseite des Shuttle-Wagenrahmens angeordnet; Das Shuttle-Chassis zwischen den sekundären Gabelausfahrmechanismen ist mit einer Lagerplattform zum Platzieren des Frachtkorbs ausgestattet; Der geschlossene Hohlraum des Pendelwagenrahmens ist jeweils mit einer Lagerplatte versehen, auf der nacheinander eine Antriebsplatte, eine Hauptsteuerplatte des Fahrmechanismus und eine Hauptsteuerplatte des Gabelausfahrmechanismus angeordnet sind; Die Antriebsplatte treibt den Fahrmechanismus an, um das Shuttle so anzutreiben, dass es auf der geraden Schiene läuft. Die Hauptsteuerplatine des Fahrmechanismus steuert die Laufparameter und Start-Stopp-Positionen des Shuttles, und die Hauptsteuerplatine des Gabelausfahrmechanismus steuert den sekundären Gabelausfahrmechanismus, um den Korb zu greifen und auf dem Regal zu platzieren; Zwischen dem Pendelwagen und dem geraden Gleis ist eine Sammelvorrichtung angebracht, die mit dem im Inneren des geraden Gleises angeordneten Stromkabel verbunden ist und zur Stromversorgung des Pendelwagens dient. Das Strukturmerkmal des aufsteckbaren intelligenten Pendelwagens für die Lagerung besteht auch darin, dass an den Stellen, an denen das Antriebsrad bzw. das passive Rad die Verbindungswelle berühren, Nuten angebracht sind und in der Nut ein elastischer Haltering eingesetzt ist, um die Axialachse zu bilden Positionierung des Antriebsrads und des Passivrads. Doppelte Führungsräder sind jeweils an der Seite des Shuttle-Chassis unter dem Antriebsrad und dem passiven Rad sowie zwischen der geraden Schiene und dem Shuttle-Chassis angebracht. Die Doppelführungsräder bilden die linke und rechte Begrenzung, wenn das Antriebsrad und das Passivrad auf der geraden Strecke laufen. Der sekundäre Gabelverlängerungsmechanismus umfasst: die Gabelverlängerungsdruckplatte der ersten Ebene, die Gabelverlängerungsplatte der zweiten Ebene, den synchronen Riemenscheibenmechanismus der zweiten Ebene, den Gabelverlängerungsantriebsmechanismus der zweiten Ebene, den Gabelverlängerungsantriebsmotor, ein weiteres Untersetzungsgetriebe und die Antriebswelle ; Die Außenseite der Nabenhalterung des Shuttle-Wagenrahmens ist mit einer Druckplatte für die Gabelverlängerung der ersten Stufe versehen; In der Mitte der Gabeldruckplatte der ersten Stufe ist eine U-förmige Rutsche angeordnet, und in der U-förmigen Rutsche sind in gleichen Abständen mehrere U-förmige Rutschenscheiben angeordnet. Eine sekundäre Gabelplatte ist außerhalb der U-förmigen Rutsche angeordnet; Die sekundäre Gabelplatte ist über Schrauben und Muttern mit mehreren U-förmigen Rillenscheiben verbunden. Die oberen Enden der Gabelverlängerungsplatte der zweiten Stufe sind jeweils von außen nach innen mit einer Schaltgabel, einem Gleichstrom-Planetengetriebemotor und einem fotoelektrischen Sensor versehen; Mit dem fotoelektrischen Sensor wird das Positionssignal der Gabel erfasst und an die Hauptsteuerplatine des Gabelverlängerungsmechanismus gesendet, die den Gleichstrom-Planetengetriebemotor steuert, um die Gabel horizontal oder vertikal zu bewegen. Ein sekundärer Synchronriemenscheibenmechanismus ist jeweils auf der primären Gabeldruckplatte und direkt unter und über der U-förmigen Rutsche angeordnet; Der sekundäre Synchronriemenscheibenmechanismus ist mit der Synchronriemen-Druckplatte auf der sekundären Gabelverlängerungsplatte verbunden; Der Gabelverlängerungs-Antriebsmotor und ein weiteres Untersetzungsgetriebe treiben den sekundären Gabelverlängerungs-Antriebsmechanismus zur Bewegung an und treiben den sekundären Gabelverlängerungs-Antriebsmechanismus auf der anderen Seite zur Bewegung über die Antriebswelle an, so dass sich die primäre Gabelverlängerungs-Druckplatte bewegt und die sekundäre antreibt Synchroner Riemenscheibenmechanismus zum Bewegen, wodurch die sekundäre Gabelverlängerungsplatte zum Bewegen angetrieben wird. Der zweistufige Gabelausfahrgetriebemechanismus umfasst einen magnetischen Encoder, eine Synchronriemenscheibe I, einen Synchronriemen I, eine Spannradvorrichtung und eine Zahnstange; Eine Zahnriemenscheibe 1 und ein Zahnriemen 1 sind unterhalb der Gabeldruckplatte der ersten Stufe angeordnet; Eine Seite der Synchronriemenscheibe I ist mit der Getriebewelle verbunden, und die andere Seite ist über die Keilnut mit der Abtriebswelle des anderen Untersetzungsgetriebes verbunden. Auf beiden Seiten des anderen Untersetzungsgetriebes sind jeweils Spannradvorrichtungen angebracht, um die Synchronriemenscheibe I und den Synchronriemen I zusätzlich zu fixieren. Zwischen der Gabeldruckplatte der ersten Stufe und dem Synchronriemen ist eine Zahnstange angeordnet; Der Antriebsmotor für die Gabelverlängerung und ein weiteres Untersetzungsgetriebe treiben die Synchronriemenscheibe I und den Synchronriemen I zum Drehen an und treiben die Synchronriemenscheibe II und den Synchronriemen II auf der anderen Seite über die Übertragungswelle zum Drehen an. Gleichzeitig treiben die Zahnstangen auf beiden Seiten die entsprechende primäre Gabelverlängerungs-Druckplatte an, um eine primäre Gabelverlängerung zu erreichen. Wenn sich der sekundäre Synchronriemenscheibenmechanismus synchron bewegt und die sekundäre Gabelverlängerungsplatte in Bewegung versetzt, rollt die U-förmige Riemenscheibe in der U-förmigen Rutsche und sorgt dafür, dass die sekundäre Gabelverlängerungsplatte die sekundäre Gabelverlängerung realisiert. Die Spannradvorrichtung umfasst: Bolzen, Einstellhalterung, Doppelmutter und Spannrad; Unterhalb des Synchronriemens I und auf beiden Seiten des anderen Untersetzungsgetriebes ist ein Spannrad angeordnet, das über eine Doppelmutter an der Hauptkörperhalterung befestigt ist. Unter der Doppelmutter ist durch die Schraube eine Einstellhalterung angeordnet, und die Position der Einstellhalterung wird durch die Schraube eingestellt, so dass die Einstellhalterung die Doppelmutter zum Auf- und Abbewegen antreibt, so dass der Synchronriemen aufrechterhalten werden kann Spannungszustand unter der Wirkung des Spannrades.
Wie wird der HEGERLS-Shuttlebus den Unternehmensnutzen steigern?
Erstens sind der Fahrmechanismus, der Gabelverlängerungsmechanismus und der Rahmen, die Gleitleitung und die Stromsammelvorrichtung des intelligenten Shuttle-Wagens von HEGERLS mit aufsteckbarer Lagerung sinnvoll angeordnet, wodurch der Raum des Shuttle-Wagens voll ausgenutzt wird und er sich an die anpassen kann Automatisches Ein- und Auslagern von Waren unterschiedlicher Spezifikationen und Standorte im dreidimensionalen Lager, wodurch der Anwendungsbereich des Shuttle-Wagens erweitert wird und eine Reihe kontinuierlicher Aktionen des Shuttle-Wagens wie Gehen, Ausfahren der Gabel und Kommissionieren schnell und effektiv ausgeführt werden Das Aufstellen und Platzieren von Waren ermöglicht eine schnelle und genaue Lagerung von Waren, wodurch die Betriebseffizienz und der Grad der Automatisierungstechnologie des automatisierten Lagers erheblich verbessert und die Investitionskosten von Unternehmen gesenkt werden. Gleichzeitig ist der Aufbau einfach und leicht, die Zuverlässigkeit hoch und die Wartung einfach. Es kann den herkömmlichen Straßenstapler ersetzen, nutzt die Flexibilität des Systems und entspricht dem Entwicklungstrend der E-Commerce-Logistik und Lagerautomatisierung.
Zweitens sind im Fahrmechanismus des intelligenten Pendelwagens von HEGERLS die Verbindungswellen der Antriebsräder und der passiven Räder mit Nuten versehen, und die Verbindungsteile der Lager sind durch einen neuartigen elastischen Haltering verbunden, wodurch der axiale Positionierungseffekt der Verbindung realisiert wird Wellen; Durch die Verwendung des elastischen Halterings zur Erzielung des axialen Positionierungseffekts kann die Produktionseffizienz gesteigert und Kosten gespart werden.
Drittens: Der intelligente Shuttle-Wagen von Higelis HEGERLS zur Lagerhaltung erkennt, dass sich das Antriebsrad und das passive Rad durch die doppelte Führungsradstruktur immer auf der geraden Spur bewegen, ohne von der Spur abzuweichen. Diese Positionierungsstruktur ist stabiler und zuverlässiger.
Viertens kann die sekundäre Gabelverlängerungsstruktur des intelligenten Shuttle-Wagens von HEGERLS den Gabelverlängerungsabstand vergrößern und mehr Körbe an verschiedenen Positionen erhalten; Gleichzeitig ist das Prinzip des sekundären Gabelausfahrmechanismus einfach und die Konstruktions- und Herstellungskosten niedrig; Der Getriebeteil übernimmt den Modus eines einzelnen Motors + Untersetzungsgetriebes + Getriebewelle, damit der sekundäre Gabelverlängerungsmechanismus den Zweck der synchronen Expansion und Kontraktion erreicht, was mehr Kosten spart, den erforderlichen Bauraum effektiv reduziert und das Gewicht des Shuttle-Wagens reduziert .
Fünftens verfügt der intelligente Shuttle-Wagen von Higelis HEGERLS über eine neue Art von Spannradvorrichtung, die den Synchronriemen schnell gespannt halten und die normale Arbeit des Shuttle-Wagens realisieren kann. Darüber hinaus ist diese Spannradvorrichtung einfach herzustellen, bequem zu installieren und kann schnell eingestellt werden, was Kosten spart, Platz spart und die Arbeitseffizienz verbessert.
Zeitpunkt der Veröffentlichung: 19. Dezember 2022