


Mit der Entwicklung der E-Commerce-Branche erfordert der Markt eine schnellere Verteilung und Logistikgeschwindigkeit. Gleichzeitig führt der Anstieg der Arbeitspreise dazu, dass der Wert des Systems „Ware zum Menschen“ neu bewertet wird. Der Markt stellt nach und nach fest, dass das System „Ware zum Menschen“ den Druck von Lagerhaltung und Logistik lindern kann. Bisher gab es neue Veränderungen im Prozess der Lagerautomatisierung: von der traditionellen manuellen Lagerhaltung über die maschinelle Lagerhaltung mittels Förderbändern, Transportfahrzeugen etc. bis hin zur integrierten automatischen Lagerhaltung. Heutzutage ist der Einsatz künstlicher Intelligenz und Algorithmen offiziell in eine neue Phase der Lagerautomatisierung eingetreten. Hercules Hegerls ist sich bewusst, dass der Aufbau einer automatisierten Lagerhaltung die Integration verschiedener Logistikgeräte und -technologien erfordert. Das von Hegerls entwickelte Kubao-System zeigt kürzlich die nahtlose Docking-Funktion von der Übertragung über die Lagerung bis zur Sortierung im Lagerszenario. Gleichzeitig kann die perfekte Zusammenarbeit zwischen dem Kubao-System und dem Roboterarm auch die Speicherintegrationsfähigkeit des Kubao-Systems sichtbarer machen. Was ist also ein vollautomatischer unbemannter Lagermanipulator? Welche beherrschende Stellung nimmt es bei der Lagerung von Gütern ein? 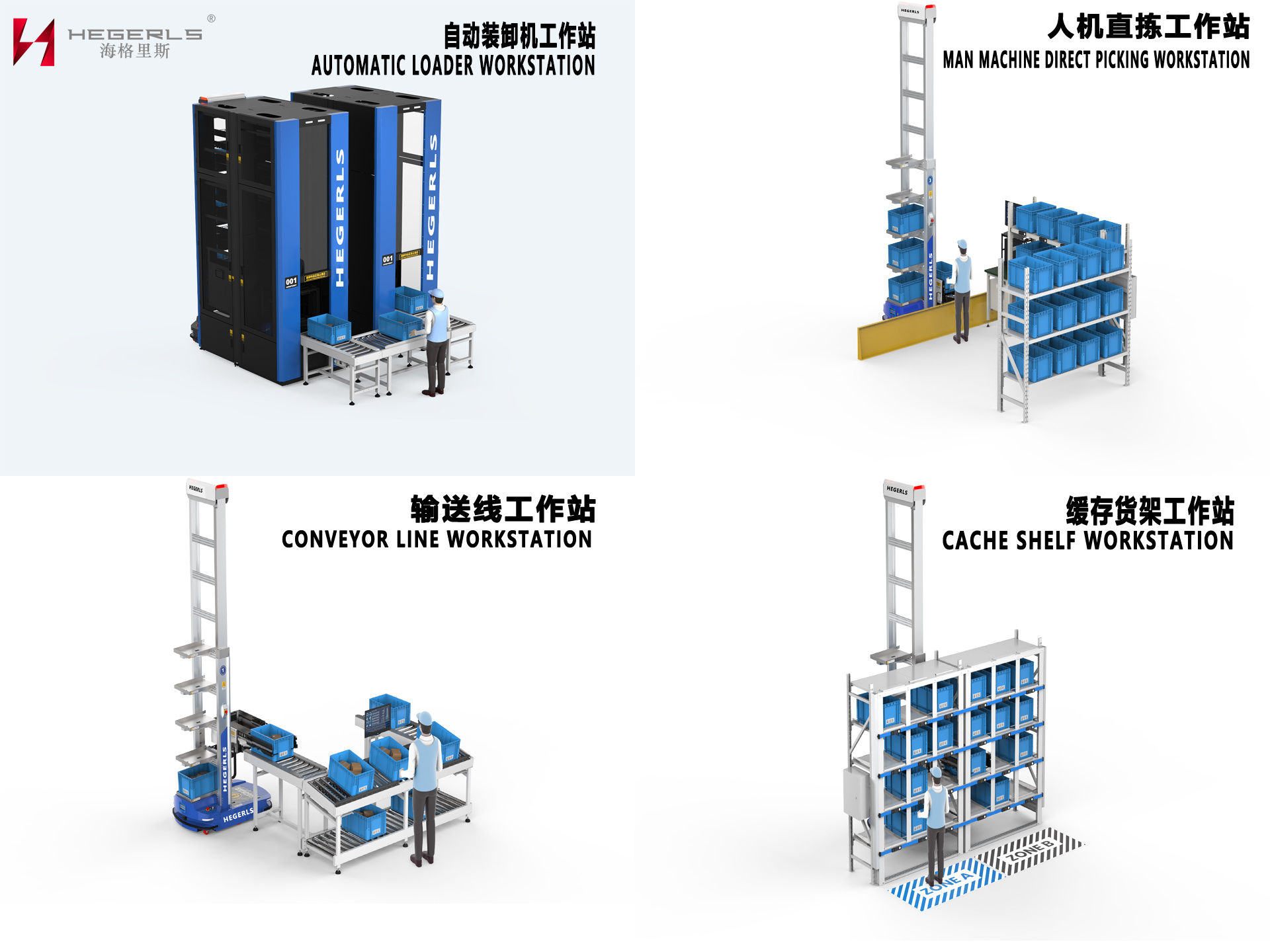 Hercules Hegels hat sich eingehend mit den Schwachstellen der Benutzer befasst, die neuen Bedürfnisse des Marktes erfasst und kontinuierlich innovative Lösungen entwickelt, die für verschiedene Szenarien geeignet sind. In Bezug auf die Mensch-Computer-Interaktion verfügt Hagerls über ein einzigartiges Verständnis und hat mehrere Mensch-Computer-Interaktionsmodi und -schemata entwickelt, darunter einen automatischen Lader-Arbeitsplatz, einen Mensch-Computer-Direktsortier-Arbeitsplatz, einen Förderband-Arbeitsplatz, einen Cache-Regal-Arbeitsplatz und einen Manipulator-Arbeitsplatz . Die spezifische Klassifizierung lautet wie folgt: Erstens: Mensch-Maschine-Direktkommissionierungsarbeitsplatz Bei der Mensch-Maschine-Direktsortierarbeitsstation kann der Bediener direkt am Korb der Maschine sortieren, und die Sortierung kann nur durch die Konfiguration einer Arbeitsstation und einer Scanpistole abgeschlossen werden. Zweitens: Übertragungsleitungs-Workstation Der Roboter verbindet sich mit der Förderstrecke. Der Roboter stellt die Materialkiste auf den Korb am Förderband, und das Förderband sendet die Materialkiste an die Personen vor ihm. Die Kommissionierung erfolgt direkt in der Materialkiste, was den Kommissionierkomfort für den Bediener erheblich verbessert und Sicherheitsprobleme vermeidet. Drittens, Cache-Shelf-Workstation Der Roboter stellt die Materialkiste auf das Cache-Regal und die Leute pflücken auf dem Regal. Roboter werden losgelassen und gehen los, wodurch die Effizienz freigesetzt wird. Viertens, automatische Lader-Workstation Um die Synergie der Mensch-Computer-Effizienz voll auszuschöpfen, erfand Haggis Hegerls die automatische Be- und Entlademaschine, die die Art und Weise der Interaktion zwischen Waren und Menschen erneut unterwanderte. In Kombination mit den effizienten Multi-Container-Handhabungseigenschaften von Kubao wurde das Be- und Entladen mehrerer Container realisiert und die Effizienz der Lagerung und Lagerhaltung erheblich verbessert. Die automatische Be- und Entlademaschine wurde speziell für das Kistenlager-Robotersystem entwickelt, wodurch der Interaktionsmodus zwischen Gütern und Menschen weiter innoviert, die Arten von Arbeitsplätzen im Lagersystem bereichert und die Effizienz des Lagerbetriebs verbessert werden.
Hercules Hegels hat sich eingehend mit den Schwachstellen der Benutzer befasst, die neuen Bedürfnisse des Marktes erfasst und kontinuierlich innovative Lösungen entwickelt, die für verschiedene Szenarien geeignet sind. In Bezug auf die Mensch-Computer-Interaktion verfügt Hagerls über ein einzigartiges Verständnis und hat mehrere Mensch-Computer-Interaktionsmodi und -schemata entwickelt, darunter einen automatischen Lader-Arbeitsplatz, einen Mensch-Computer-Direktsortier-Arbeitsplatz, einen Förderband-Arbeitsplatz, einen Cache-Regal-Arbeitsplatz und einen Manipulator-Arbeitsplatz . Die spezifische Klassifizierung lautet wie folgt: Erstens: Mensch-Maschine-Direktkommissionierungsarbeitsplatz Bei der Mensch-Maschine-Direktsortierarbeitsstation kann der Bediener direkt am Korb der Maschine sortieren, und die Sortierung kann nur durch die Konfiguration einer Arbeitsstation und einer Scanpistole abgeschlossen werden. Zweitens: Übertragungsleitungs-Workstation Der Roboter verbindet sich mit der Förderstrecke. Der Roboter stellt die Materialkiste auf den Korb am Förderband, und das Förderband sendet die Materialkiste an die Personen vor ihm. Die Kommissionierung erfolgt direkt in der Materialkiste, was den Kommissionierkomfort für den Bediener erheblich verbessert und Sicherheitsprobleme vermeidet. Drittens, Cache-Shelf-Workstation Der Roboter stellt die Materialkiste auf das Cache-Regal und die Leute pflücken auf dem Regal. Roboter werden losgelassen und gehen los, wodurch die Effizienz freigesetzt wird. Viertens, automatische Lader-Workstation Um die Synergie der Mensch-Computer-Effizienz voll auszuschöpfen, erfand Haggis Hegerls die automatische Be- und Entlademaschine, die die Art und Weise der Interaktion zwischen Waren und Menschen erneut unterwanderte. In Kombination mit den effizienten Multi-Container-Handhabungseigenschaften von Kubao wurde das Be- und Entladen mehrerer Container realisiert und die Effizienz der Lagerung und Lagerhaltung erheblich verbessert. Die automatische Be- und Entlademaschine wurde speziell für das Kistenlager-Robotersystem entwickelt, wodurch der Interaktionsmodus zwischen Gütern und Menschen weiter innoviert, die Arten von Arbeitsplätzen im Lagersystem bereichert und die Effizienz des Lagerbetriebs verbessert werden.

In der späteren Phase entwickelte Hegerls auch den Hegerls-Manipulator, nämlich den vollautomatischen, unbemannten Lagermanipulator-Arbeitsplatz von Hegerls, der hauptsächlich durch den Manipulator statt durch manuelles Andocken an den Förderband-Arbeitsplatz oder den automatischen Lader-Arbeitsplatz realisiert wird. Die Förderlinie oder die automatische Be- und Entlademaschine ist mit Robotern der Kubao-Serie verbunden, um die entladenen Materialkisten oder die Materialkisten, die geladen werden müssen, automatisch zu befördern. Der mechanische Arm ersetzt die Arbeiter beim Sortieren der Auftragswaren und realisiert den vollautomatischen unbemannten Lagerprozess. Es bietet die Vorteile intelligenter Automatisierung, null Arbeitskosten, effizienter Lagerhaltung und Lagerhaltung. Kubao realisiert die intelligente Lagerung und Handhabung im Reservoirbereich, das Andocken des mechanischen Arms, die intelligente Sortierung von Kleingütern durch den mechanischen Arm, und der Liefer- und Lagerungsprozess wird durch die Förderlinie vervollständigt. Der Sortierprozess der manuellen Betriebsplattform entfällt und der gesamte Prozess des unbemannten Betriebs ist auf eine Vielzahl von Anwendungsszenarien anwendbar, einschließlich Wareneingang und Produktionsfertigung. Anwendbares Szenario: Es ist insbesondere auf das Kommissionierungsszenario von Supermarkt-Einzelhandelsartikeln anwendbar.


Funktionsmerkmale der vollautomatischen unbemannten Lagermanipulator-Workstation von Hagerl Arbeitskräfte befreien – vollautomatische und unbemannte Lagerhaltung realisieren, Arbeitskräfte zum Sortieren von Waren ersetzen und vollautomatische Lagerhaltung und Lagerung realisieren; Intelligente Sortierung – das intelligente Managementplattformsystem von haiq verbindet sich nahtlos mit dem Bewegungssteuerungssystem des Manipulators und sendet direkt Anweisungen, um den Manipulator beim Sortieren der Waren anzuleiten; Flexibles Andocken – Andocken an Kubao-Roboter, Förderbänder, Lagerregale oder automatische Be- und Entlademaschinen, um den Anforderungen verschiedener Geschäftsszenarien gerecht zu werden; Effiziente Lager- und Ausgangsleistung – jeder Roboter befördert 25–35 Kartons pro Stunde hinaus + 25–35 Kartons pro Stunde hinein, und die Lager- und Ausgangseffizienz kann bis zu 300 Kartons pro Stunde erreichen.


Hagerls konzentriert sich auf die Forschung und Entwicklung sowie das Design intelligenter Lagerrobotersysteme und setzt sich dafür ein, die Kosten zu senken und die Effizienz für Kunden durch Robotertechnologie und Algorithmen der künstlichen Intelligenz zu steigern, um ein effizientes, intelligentes und flexibles intelligentes Lagersystem zu schaffen. Die Anerkennung des Marktes und der Kunden wird zur treibenden Kraft für den kontinuierlichen Fortschritt von Hegels. Hagerls wird sich intensiv mit Innovation und Forschung und Entwicklung befassen und sich dabei auf die Forschung und Entwicklung sowie das Design intelligenter Lagerrobotersysteme konzentrieren. Gleichzeitig wird ein breiteres Spektrum an Anwendungsszenarien entwickelt, um die Speicherprobleme der Kunden zu lösen und die Speicheranforderungen der Kunden zu erfüllen. Roboter und künstliche Intelligenz läuten ein goldenes Zeitalter der Entwicklung ein, in dem Chancen und Herausforderungen nebeneinander bestehen. In Zukunft wird Hagerl an technologischen Innovationen und Durchbrüchen festhalten, sich auf die Segmentierung von Box-Lagerrobotern konzentrieren und die Produkt- und Funktionsmatrix basierend auf den Kundenproblemen bei der Lagerung schrittweise optimieren, um die Entwicklung und den Fortschritt der Segmentierung weiter voranzutreiben Industrie.
Zeitpunkt der Veröffentlichung: 08.07.2022